Parametri del motore del cane robot
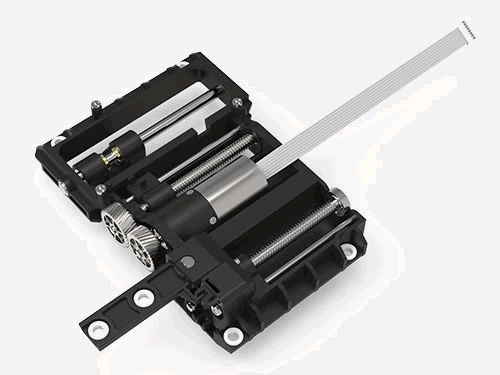
Il motore del cane del robot è un sistema di trasmissione del micromotore ad ingranaggi utilizzato per l'azionamento del giunto del cane del robot intelligente. La struttura di trasmissione principale è composta da motore di azionamento (micromotore) e riduttore (riduttore). Il motore del giunto del cane robot può guidare il cane robot a camminare in modo adattivo. Consente al cane robot di arrampicarsi su pendii e camminare su sentieri sterrati. Muovendosi in avanti, indietro, su, giù, l'angolo di imbardata, l'angolo di beccheggio e l'angolo di rollio possono essere controllati quando si cammina su una terrazza irregolare. Questo tipo di parametri tecnici deve essere personalizzato, come potenza in uscita, coppia in uscita, rumore, precisione, modalità di trasmissione del cambio, prestazioni del motore di azionamento. ZHAOWEI Machinery & Electronics Co., Ltd si impegna a fornire un servizio di personalizzazione completo.
Parametri del motore del cane robot:
| Materiale | Metallo |
|---|---|
| Diametro esterno | 24 mm |
| Temperatura di esercizio | -20℃~+100℃ |
| Direzione di rotazione | cw&ccw |
| Gioco degli ingranaggi | ≤3° |
| Voltaggio (opzionale) | 3V~24V |
| Cuscinetto | Cuscinetto poroso/cuscinetto a rotolamento |
| Velocità di ingresso | ≤15000 giri/min |
| Gioco assiale | ≤0,3 mm/≤0,2 mm |
| Attuale | 300 mA max |
| Carico radiale sull'albero di uscita | ≤120N/≤170N |
| Motori (opzionali) | Motore passo-passo/DC |
Personalizzazione
Nome del progetto: Robot Joint Motor
Contesto del progetto: nell'interazione e nella comunicazione di risposta rapida, il motoriduttore a corrente continua per robot viene utilizzato per azionare i giunti del robot, che richiede un grande rapporto potenza-massa e rapporto coppia-inerzia, coppia di spunto elevata, bassa inerzia e un ampio e regolare intervallo di regolazione della velocità. In particolare, la pinza robotica dovrebbe utilizzare un motore robot con un volume e una massa ridotti e una grande capacità di sovraccarico in breve tempo.
Risultato: il robot è combinato con il servomotore del robot planetario ZHAOWEI, che può migliorare notevolmente la qualità e l'efficienza del robot. Il motoriduttore CC per robot ha cambi di trasmissione a due stadi, tre stadi e quattro stadi. Il rapporto di riduzione, la velocità di ingresso e la coppia del riduttore possono essere regolati in base ai requisiti di progettazione del motore del robot.