Motoriduttore per Robot da Magazzino Parametri
I robot di magazzino intelligenti sono robot sviluppati per soddisfare l'allocazione degli scaffali, lo smistamento e l'integrazione di grandi magazzini. Il prodotto realizza davvero la modalità di lavoro "da scaffale a persona", che è composta principalmente dal corpo del robot e dai sensori di navigazione visiva. Il robot di magazzino intelligente può sollevare gli scaffali pieni di merci o libri e trasportare rapidamente e senza intoppi gli scaffali nel luogo designato. Al termine dell'operazione, il robot del magazzino posizionerà lo scaffale nel luogo designato in attesa dell'attività successiva.
Le merci sugli scaffali possono essere smistate secondo la programmazione della console e prodotti simili possono essere assemblati sullo stesso scaffale, il che può ridurre i tempi di consegna della merce e migliorare notevolmente l'efficienza. Il magazzino per motori elettrici è un motoriduttore che può essere utilizzato per la trasmissione, la movimentazione e lo smistamento nel moderno sistema di magazzino logistico intelligente. Presenta i vantaggi di una grande forza motrice, maggiore velocità, funzionamento stabile e bassa rumorosità. L'auto robotica utilizza un servoazionamento a bassa tensione con risposta rapida, riducendo i tempi di smistamento.

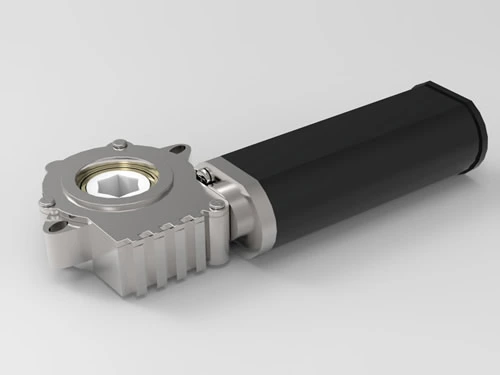
Il sistema di trasmissione principale per il magazzino micro motori è integrato da un motore di azionamento (micro motore) e un riduttore (riduttore). Come sorgente di azionamento è possibile utilizzare un motore CC con spazzole, un motore CC senza spazzole, un motore passo-passo, un motore coreless, un servomotore e può anche essere installato un encoder. Come riduttore è possibile utilizzare il riduttore epicicloidale, un riduttore in plastica o un riduttore in metallo, riduttore a vite senza fine, riduttore ad assi paralleli, riduttore cilindrico. I parametri, come potenza di uscita, velocità di uscita, rapporto di riduzione, coppia di uscita, tensione nominale, diametri, struttura del cambio, rumore di trasmissione, precisione di trasmissione, temperatura di lavoro sono sviluppati su misura. ZHAOWEI Machinery & Electronics Co., Ltd si impegna a fornire e produrre motoriduttori per robot da magazzino con parametri tecnici personalizzati (diametro: 3,4 mm-38 mm, tensione: inferiore a 24 V, potenza di uscita: inferiore a 50 W, velocità di uscita: 5 giri/min-2000 giri/min, velocità rapporto: 5-1500, coppia di uscita: 1,0 gf.cm -50kgf.cm). La precisione di rotazione del cambio è di 1-2 minuti d'arco e il rumore della trasmissione dell'ingranaggio è inferiore a 45 dB.
Parametri del motoriduttore per robot da magazzino:
| Materiale | PlasticaMetallo |
|---|---|
| Diametro esterno | 12 mm |
| Temperatura di esercizio | -20℃~+85℃ |
| Direzione di rotazione | cw&ccw |
| Gioco degli ingranaggi | ≤3° |
| Voltaggio (opzionale) | 3V~24V |
| Cuscinetto | Cuscinetto poroso/cuscinetto a rotolamento |
| Velocità di ingresso | ≤30000 giri/min |
| Gioco assiale | ≤0,3 mm/≤0,2 mm |
| Attuale | 250 mA max |
| Carico radiale sull'albero di uscita | ≤5N/≤10N |
| Motori (opzionali) | Motore passo-passo/CC/Servo |
Progetto di personalizzazione
Nome: motoriduttore per robot su ruote
Contesto del progetto: i robot intelligenti possono agire secondo procedure o programmi prestabiliti stabiliti dalla tecnologia dell'intelligenza artificiale. I prodotti intelligenti maturi possono sostituire l'uomo, come la produzione, l'edilizia o il lavoro pericoloso. I robot sono suddivisi in tipo ruota, tipo gamba, tipo cingolato, tipo serpente e tipo composto in base alla modalità di movimento. Tra questi, i robot su ruote occupano una posizione relativamente importante nel campo dei robot mobili autonomi. Hanno le caratteristiche di movimento veloce e controllo semplice e sono ampiamente utilizzati nelle linee di produzione di pallettizzazione automatica, veicoli senza pilota e altri campi.
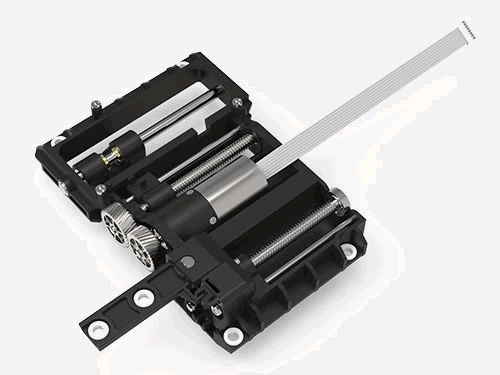
Supporto tecnico: la parte motrice del robot su ruote adotta una combinazione di un motore CC e un riduttore epicicloidale da 38 mm e un metodo di installazione antisimmetrico. Questo metodo può ridurre il punto di forza dell'albero di uscita dei motori brushless del magazzino robot, accorciare notevolmente il passo e risparmiare spazio a condizione che il set di ruote sia coassiale e fornisca maggiore potenza (di solito le dimensioni e la potenza del motore sono in un certo proporzione).
Risultato: Sulla base di test sul campo e analisi teoriche, la scarsa capacità di arrampicata è principalmente causata dalla forza motrice insufficiente del sistema di azionamento. Il motivo della mancanza di forza motrice è che il fattore di attrito della guida lineare selezionato in fase di progettazione è troppo ideale. Per risolvere la variazione del fattore di attrito della rotaia dopo l'aumento del carico del sistema, il nostro riduttore epicicloidale ha una trasmissione a due, tre, quattro stadi che può modificare il rapporto di riduzione e regolare la velocità e la coppia di ingresso del riduttore in base a i requisiti del magazzino del micromotore e del motoriduttore del robot su ruote.