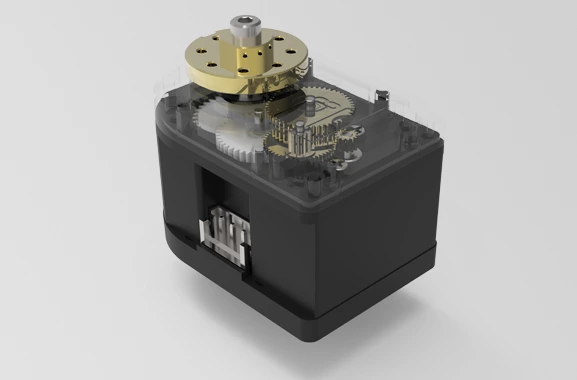
Un servomotore è costituito da un micromotore, una serie di riduttori, un potenziometro (collegato al riduttore per fungere da sensore di posizione) e un controller (comprendente generalmente un comparatore di tensione, segnale di ingresso e alimentazione).
In che modo i servomotori sono diversi dai motori passo-passo?
Un servomotore è un sistema composto da micro motori (solitamente motori passo-passo e motori brushless) e vari componenti. Quando gli impulsi elettrici vengono applicati alle bobine dello statore, il motore passo-passo genera un campo magnetico per attirare il rotore a magneti permanenti. L'errore del servomotore è generalmente piccolo. Poiché la potenza del micro servomotore proviene dal micromotore, deve esserci un controller che emetta comandi al micromotore. Anche il sistema servomotore dovrebbe avere contemporaneamente un controllo di retroazione.
Principio
L'ingranaggio di uscita del riduttore interno del servosistema è collegato a un potenziometro per formare un sensore di posizione. L'angolo di rotazione di questo sistema servomotore è quindi influenzato dall'angolo di rotazione del potenziometro. Le due estremità del potenziometro sono collegate ai poli positivo e negativo dell'alimentazione e l'estremità scorrevole è collegata all'albero rotante. Il cursore ruota con l'albero, facendo cambiare la tensione tra l'estremità del cursore del potenziometro e l'estremità negativa dell'alimentatore con la rotazione dell'albero. Questa tensione è l'alimentazione in ingresso del comparatore di tensione (amplificatore operazionale). Il segnale di controllo verrà inviato all'amplificatore operazionale insieme alla tensione di ingresso. Il segnale di controllo in ingresso è un segnale a modulazione di larghezza di impulso (PWM) e la tensione media cambia in proporzione all'alta tensione in un periodo intermedio.
Controllo della direzione del micromotore
Innanzitutto, confrontare la tensione media del segnale di ingresso con la tensione del sensore di posizione di alimentazione. Se la tensione di ingresso è superiore alla tensione del sensore di posizione di potenza, l'amplificatore emette una tensione di alimentazione positiva. Se la tensione di ingresso è inferiore alla tensione del sensore di posizione, l'amplificatore emette una tensione di alimentazione negativa. Quella è una tensione inversa. In questo modo vengono controllate le direzioni CW e CCW del micromotore e il servosistema è controllato dal gruppo di riduttori. Se il potenziometro e l'accoppiamento dell'ingranaggio di uscita non sono vincolati, possono essere accoppiati con altri alberi del riduttore impostato per controllare il rapporto di trasmissione per ottenere una gamma più ampia del servosistema, inclusa la rotazione di 360°. Ciò potrebbe causare un errore maggiore, ma non produrrà un errore cumulativo.
Ampie applicazioni
I servomotori possono essere applicati a vari bracci meccanici, robot e porte automatiche. Esistono anche servomotori speciali per coppia elevata e alta precisione per campi che richiedono elevata precisione o coppia elevata per un carico elevato. Quando si seleziona un modello, è necessario dare la priorità alla coppia. Come scegliere in modo accurato ed economico in base ai requisiti del sistema servomotore è anche una conoscenza indispensabile, che può richiedere più pratica.